





According to an article published in the Estonian World, researchers at the Tallinn University of Technology have developed an autonomous ship, called NYMO, that could be used for parcel delivery, mapping the seabed, conducting rescue operations or detecting pollution.
Robotic vacuum cleaners, lawnmowers and delivery robots are now part of our everyday lives. Researchers at Tallinn University of Technology decided to take it to the next level by building a prototype of the autonomous ship NYMO. Soon, this vessel could be used for parcel delivery, mapping the seabed, conducting rescue operations or detecting pollution.
Where did you get the idea of making such a ship?
Researcher Heigo Mõlder: Our colleague, senior research scientist Tanel Jalakas, built the first small universal and autonomous robotic platform a few years ago that could be sent from one point to another using a smartphone. We then wondered where to apply it. Since self-driving delivery robots are already being built, we decided to build the ship. Our partners, the engineering company Hyrles and MEC Marine Engineering OÜ came to help, and we put our competencies together. Our side is the power electronics and software, the MEC side has shipbuilding experience and Hyrles is involved in mass production of equipment. The Small Craft Competence Centre contributed to the design of the enclosure.
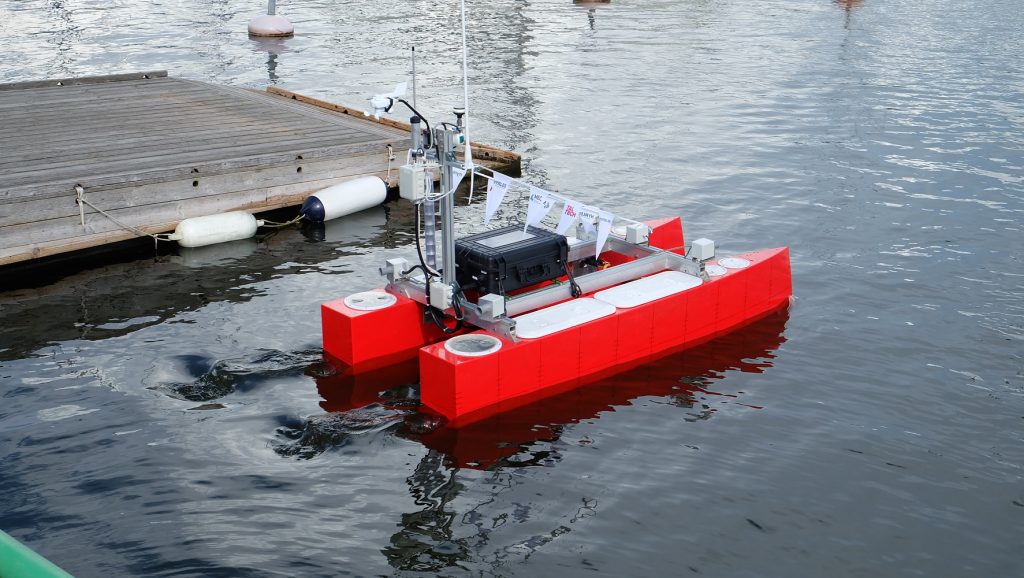
We managed to get the smart specialisation support provided by the Estonian Research Council and Archimedes for the development. Now we have reached the prototype, which is 2.5 metres long and 1.1 metres wide (8.2 x 3.6 ft), and the vessel can move from one point to another across the sea. The ship has a running range of 100 kilometres (62 miles), it takes up to 100 kilos (220 lbs) of cargo and has a top speed of 13 km/h (eight mph). In addition, the ship will monitor both the surroundings and the weather. It’s built modularly and the most important element on it is a black suitcase that is packed with electronics and can be lifted to another platform if necessary. Software development accounts for up to 80% of the total development.
What can it be used for?
Mõlder: At the moment, NYMO is a small platform which could be used for parcel delivery between smaller islands. A robotic vessel could also map the seabed and conduct rescue operations both on the lake and at sea. It can be used for intelligence activities, as a drone landing platform and as a pollution detector. On top of that, different applications can be built.
Researcher Indrek Roasto: The ship could also be part of the micro-grid, because it has a smart battery on it. If the ship is in port and has solar panels on it, the batteries are charged and we could sell this emerging power directly into the grid. Thus, the ship is like a mobile electricity generator and a battery at the same time. This could work in the Mediterranean countries and in Estonia during the summertime.
What have been the most difficult issues during this project?
Mõlder: The most complex topic is software related. Here you need to combine both hardware and software skills, so this is a multidisciplinary project. On the table, there are questions about electronics, hydrodynamics, machine-vision, sensors, radio communication etc.
What kind of sensors does this ship use to “see” and navigate?
Roasto: We are currently using ultrasonic sensors for precision navigation in the harbour so that the ship does not run into other objects. We have also considered using existing modern variants such as LIDAR, or a laser-distance metric, which is often used in cars. The downside of LIDAR is the high price, and it can’t see anything in foggy weather. Static radar can also be used, which can understand what sector some objects are in. We’ll probably put a little radar on it so we can see up to a few hundred metres away and navigate in the harbour and at sea.
Secondly, we are considering installing a camera that uses image processing and object detection. That’s where the self-learning algorithms come in and a very powerful computer is needed, and that’s more the subject of the future. In addition to ultrasound sensors, it has an AIS or maritime Automatic Identification System, a box that transmits GPS data and receives data from surrounding ships. This information goes to a processor capable of momentarily making decisions about whether it is on a collision course.
You have tested the ship both on lake and on sea. What were the results of these tests?
Mõlder: Every time it’s gotten better and better. First, we tried to get the ship moving, so it could sail from point to point and this part works now. In the next step, the ship must be able to identify the surroundings, and in the third, it has to be able to plan its own route – these steps still need developing. The experiments have gone relatively well, and I don’t think there have been any serious setbacks. We had to replace some of the controllers, because they got wet. Unfortunately, salty sea water and electronics don’t go well together. We are moving according to a specific work plan and essentially developing software now.
Roasto: The greatest achievement is that we were able to prove the sea and water resistance of the vessel this August. There was a wave up to one and a half metres (five feet) at sea, and the ship survived because it is unsinkable. Although the wave was constantly on board, both the electronics and the controls were in working order. In addition to Naissaar Island, we also visited Keri Island, which means that trip back and forth is 40 kilometres (25 miles). It was a test of whether the ship could survive at sea and be able to run on batteries. The test was very successful with energy left over, and based on this trip, the current mileage can be predicted at around 60-70 kilometres (37-43 miles). If we optimise the algorithms and engine control, we can probably even get it to 100 kilometres.
If you’re familiar with the work of your competitors, how does NYMO differ from their vessels?
Mõlder: We can’t access the details of competitors, but the main battle is over software. Similar platforms are being developed around the world, but as there are many companies and brands in the car industry, there are also many players in the maritime industry. What sets us apart is that we will be developing this boat in a very certain direction in the future. The overall functionality of a ship can be obtained by making a prototype, but then we focus either on specific sea rescues or, for example, on parcel delivery and then the necessary applications can be further developed in a specific direction.
Roasto: We want to make it cheaper, more reliable and very energy efficient. I have not heard very much elsewhere that anyone emphasizes on the energy side, but that is our strength. Maybe in the future we should design our own converters and chargers for the ship? This could help to improve the travel range. Unfortunately, there are not many robotic ship makers in the Baltic Sea region yet, and we are trying to be the first.
Mõlder: These ships have not been mass-produced yet and they exist only as prototypes and at the developmental level. This is just as hot a topic as self-driving cars that aren’t very much in traffic yet.
When could NYMO move from prototype to mass production?
Mõlder: We hope we will be able to launch some pilot projects within a couple of years between small islands, in the area of parcel delivery, for example. During this time, we still hope to get beyond this lab.
What could be the initial cost of this ship?
Mõlder: It’s hard to say because we’re in the development phase right now, and it takes a lot of work. I guess I don’t dare to say that price right now.
Roasto: Maybe we’re not going to sell boats, but rather provide a service. We are currently working on different variants of business models. We can provide either parcel or rescue services. We currently have a prototype and the next step now is to have a business model and business plan, and finally to choose the focus.

Does this ship need a human to control it from behind the remote?
Mõlder: It would be good if a person was still watching the ship. Of course, we are trying to minimise the tasks of the human so that the vessel can do as many things as possible. But in the future, when there are many of these ships, there will be an operating centre where one person manages five to ten ships at a time across the screen. Theoretically, the ship should go to port itself to charge like a robotic vacuum cleaner or robotic lawnmower. We will probably get to the development of the Operator Centre later, but now cameras and other sensors are installed on a ship and we can monitor the vessel from our computers.
Roasto: There is quite a lot of news about autonomous vessels, but as we get deeper, it turns out that these are not autonomous, but remotely operated, and there is a big difference.
As our resources are relatively limited and we are initially smaller players, we need to make this ship smarter and so autonomous that we don’t have to constantly keep an eye on it.
Did you subscribe to our daily newsletter?
It’s Free! Click here to Subscribe!
Source: Estonian World




















{kind=link}